
2023-08-27 07:58:39
2023-11-26 16:00:00
面议
发明专利
发明专利
电子科技大学
B-作业;运输
四川省
0838-6811888、 6939740 复制
暂无
暂无
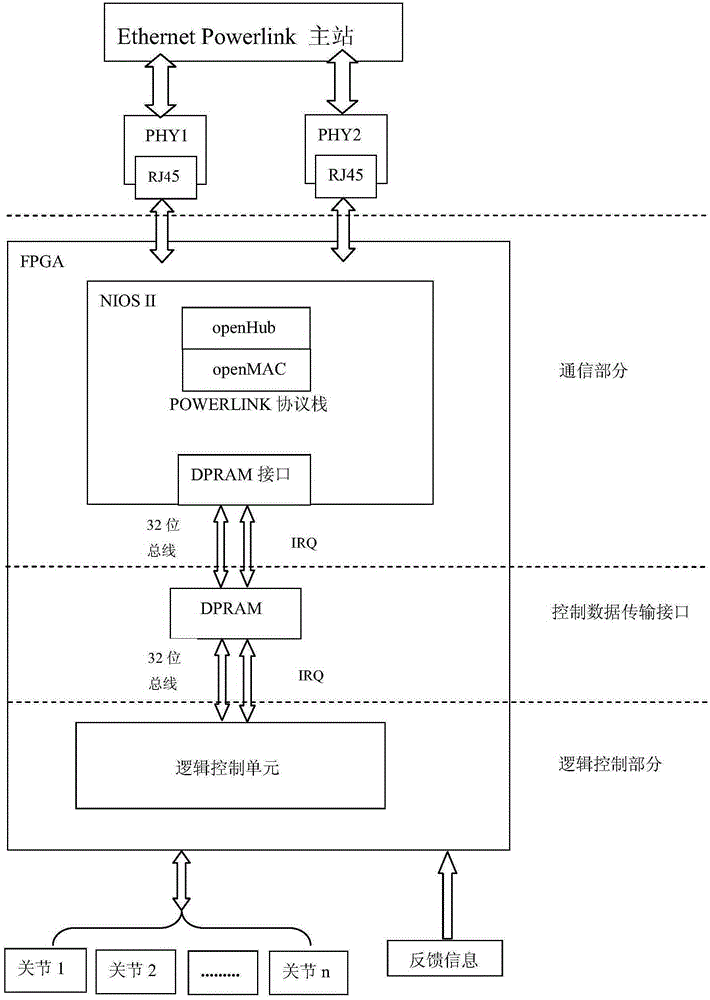
本发明公开了一种基于Powerlink的机器人控制方法,包括Ethernet?Powerlink主站和FPGA从站,所述FPGA从站由通信部分、控制数据传输接口和逻辑控制部分组成,所述通信部分包括软核处理器,控制数据传输接口包括DPRAM,所述逻辑控制部分由逻辑控制单元组成,所述软核处理器上设有DPRAM控制模块。与现有技术相比,本发明中通信部分用来实现从站的Powerlink协议,主站通过以太网和从站传输数据,而且在保证数据传输高速的同时也确保了数据的完整性和不丢失性,机器人控制信息和传感器等反馈信息能够达到ms级的刷新速度,使得机器人的性能得到大幅度的提升。