
2023-08-27 14:35:25
2023-11-27 00:00:00
面议
发明专利
发明专利
电子科技大学
B-作业;运输
四川省
0838-6811888、 6939702 复制
暂无
暂无
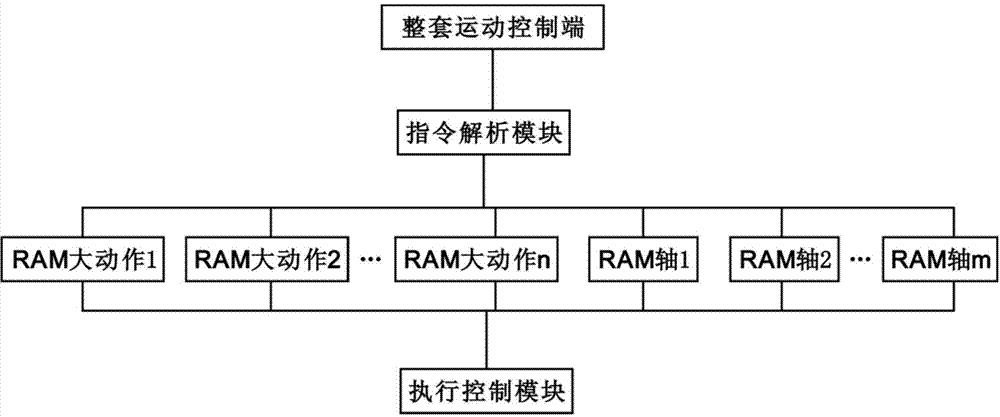
本发明公开了一种基于FPGA的多指节机器人控制系统及其控制方法,包括整套运动控制端、指令解析模块以及RAM控制组;整套运动控制端与指令解析模块电通信连接,RAM控制组包括有RAM大动作和RAM轴;RAM大动作接收并储存来自于指令解析模块中相对应的RAM指令,RAM大动作的RAM指令用于控制相对应的大动作运动操作;RAM轴接收并储存来自于指令解析模块中相对应的RAM指令,RAM轴的RAM指令用于控制相对应的轴运动操作;指令解析模块分别与各个RAM大动作、RAM轴电通信连接,各个RAM大动作和RAM轴分别与执行控制模块电通信连接。本发明控制机器人运动的逻辑分析仅为一次,控制变得更加简便、快捷,机器人的整套运动将更为顺畅、有序。